Skip to main content
Main navigation
About
CEI-Sphere Approach
Join our Task Forces
About CEI-Sphere
Relevant Policy & Regulations
Results
Publications
Market Insights
Discover key CEI use cases
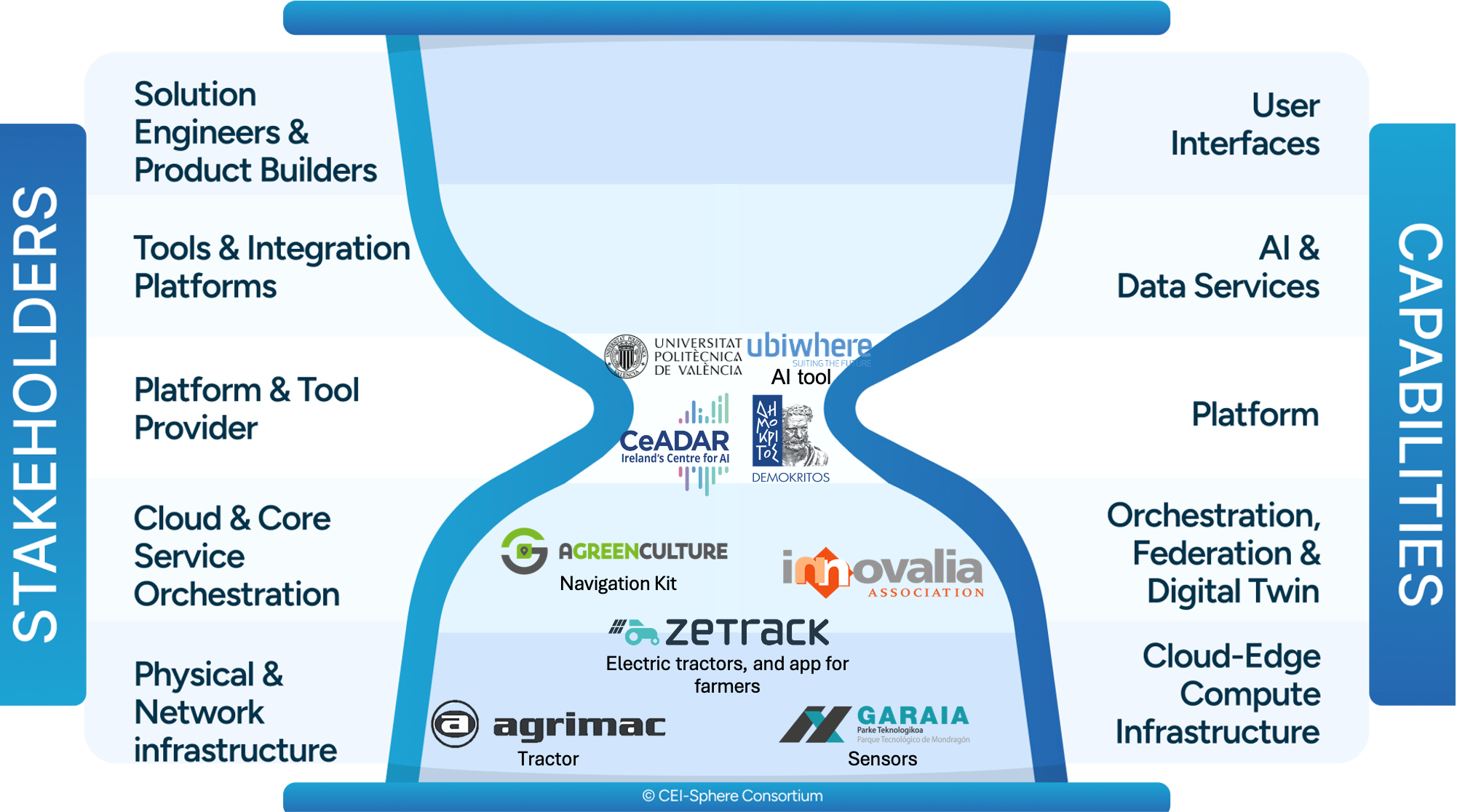
Hourglass Model 2025
The Hourglass Model in Use
News & Events
News
Events
EUCEI
Partners
Get Funded
COP-PILOT Open Calls
O-CEI Open Calls
Search
Breadcrumb
Home
The Hourglass Model in Use
Pilot 6 | Use Case 2: Remote route optimisation and task planning of robot tractors
View related use case/s:
Remote route optimisation and task planning of robot tractors